Grundlæggende princip for positionering | VG3
GPS fungerer ved at satellitterne udsender signaler (elektromagnetiske bølger) på to forskellige frekvenser 1575,42 MHz og 1227,60 MHz. Bølgerne er påmoduleret forskellige sekvenser af binære koder. Koderne indeholder information som GPS-modtageren anvender til at bestemme sin position. Det er dels information om satellitternes forudberegnede positioner der ligger i den såkaldte navigationsbesked (også kaldet GPS-almanak), og dels information om tidspunktet for afsendelse af signalerne fra satellitterne der udtrækkes fra de såkaldte PRN koder.
Alle GPS-satellitter indeholder atomure hvor tiden (eller frekvensen) er styret af svingninger mellem to energiniveauer for cæsium eller rubidium atomer. Det betyder, at tiden for afsendelse af hver enkelt bit af koderne kan bestemmes meget præcist, og det betyder i sidste ende at en GPS-modtager kan bestemme hvor lang tid, det har taget for et signal at komme fra satellitten til modtagerne på jorden. Transmissionstiden, som er ca. 67 millisekunder, omregnes til en afstand ved at multiplicere med lysets hastighed. GPS-modtageren kan så bruge afstande til flere satellitter til at bestemme sin position, fordi den samtidig har fået information om, hvor de enkelte satellitter befinder sig.
Med afstand til 3 satellitter får man i princippet 3 kugler som skærer hinanden et sted i rummet og det sted hvor de skærer hinanden ligger positionen. Desværre er urene i GPS-modtagerne ikke så gode som urene i satellitterne og derfor er det nødvendigt at kende afstanden til en fjerde satellit, så man også kan få bestemt modtagerens urfejl.
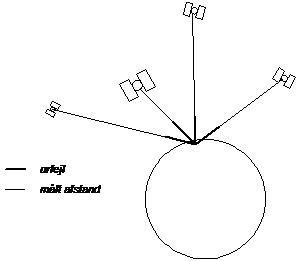
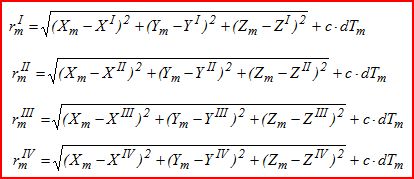
For hvert satellitsignal kan man opstille ligningen på billedet til højre:
Hvor:
r målt pseudoafstand mellem satellit I og modtager m, angivet i meter
Xm, Ym, Zm modtagerens ukendte koordinater, angivet i meter
XI, YI, ZI satellittens kendte koordinater, angivet i meter
c lysets hastighed, angivet i meter per sekund
dT modtagerens urfejl, angivet i sekunder
Der er altså fire ubekendte i ligningen, modtagerens X, Y, Z koordinater og dens urfejl.
Med måling af afstanden til fire satellitter kan vi opstille fire ligninger, og så har vi et system med fire ligninger og fire ubekendte og det kan løses. Dette ses på billedet til højre.
Da ligningerne indeholder både kvadrater og kvadratrødder kan systemet lineariseres så det bliver lettere at løse. I praksis vil en GPS-modtager ofte have kontakt til op mod 10 satellitter af gangen. Dermed kan man opstille 10 ligninger, stadig med blot 4 ukendte, og så får vi et overbestemt ligningssystem med flere målinger end ubekendte. Ved at anvende forskellige statistiske metoder, eller metoder fra numerisk analyse til løsning af ligningssystemer, for eksempel mindste kvadraters princip, kan man få en iterativ og meget præcis bestemmelse af GPS-modtagerens position samtidig med at man får en beregning af usikkerheden på positionen – altså positionens nøjagtighed.
I praksis betyder det at jo flere satellitter vi får data fra, jo mere nøjagtig bliver positionen. Hvis man har en GPS-modtager i en bil og kører på en øde vej på landet, vil man ofte have en bedre positionsnøjagtighed end i skov- og byområder hvor træer og høje bygninger blokerer for nogle af satellitsignalerne.
Når GPS anvendes til navigation beregner GPS-modtageren typisk en position en gang i sekundet. Flere positioner bestemt hurtigt efter hinanden kan anvendes til at bestemme både hastighed og retning (kurs) for modtageren, og dermed kan GPS anvendes i biler, skibe eller fly til både at finde ud af hvor man er, hvilken retning man skal bevæge sig i for at nå frem til målet og til en beregning af det forventede ankomsttidspunkt.
Da ligningerne indeholder både kvadrater og kvadratrødder kan systemet lineariseres så det bliver lettere at løse. I praksis vil en GPS-modtager ofte have kontakt til op mod 10 satellitter af gangen. Dermed kan man opstille 10 ligninger, stadig med blot 4 ukendte, og så får vi et overbestemt ligningssystem med flere målinger end ubekendte. Ved at anvende forskellige statistiske metoder, eller metoder fra numerisk analyse til løsning af ligningssystemer, for eksempel mindste kvadraters princip, kan man få en iterativ og meget præcis bestemmelse af GPS-modtagerens position samtidig med at man får en beregning af usikkerheden på positionen – altså positionens nøjagtighed.
I praksis betyder det at jo flere satellitter vi får data fra, jo mere nøjagtig bliver positionen. Hvis man har en GPS-modtager i en bil og kører på en øde vej på landet, vil man ofte have en bedre positionsnøjagtighed end i skov- og byområder hvor træer og høje bygninger blokerer for nogle af satellitsignalerne.
Når GPS anvendes til navigation beregner GPS-modtageren typisk en position en gang i sekundet. Flere positioner bestemt hurtigt efter hinanden kan anvendes til at bestemme både hastighed og retning (kurs) for modtageren, og dermed kan GPS anvendes i biler, skibe eller fly til både at finde ud af hvor man er, hvilken retning man skal bevæge sig i for at nå frem til målet og til en beregning af det forventede ankomsttidspunkt.





